步进电机原理
考研考完了,下面要准备毕业设计了,今天开始做毕业设计,先梳理一下步进电机基础知识点,后面补充一下伺服电机知识点
参考书:步进电机和伺服电机的应用与维修 杜增辉 孙克军 编著 第一章
步进电机的原理
用途特点
步进电机是一种控制电机,控制电机与普通电机相比侧重于高精度和快速反应
控制电机有两个关键,一是要告诉电机如何做,第二是要给电机提供能源让他做工;
所以把控制电机分为两类信号元件和功率元件
信号元件:用来转换信号的部分
功率元件:将电能转换为机械做功的部分
步进电机就是用脉冲信号控制的,把脉冲信号转换为角位移的一种电机,被广泛用于数控系统中
优点在于便于控制,反应速度快,误差小, 在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响 ;缺点是效率低,常出现共振和震荡
原因
低频震荡:当步进电动机工作在低频区时,由于励磁脉冲间隔的时间较长,步进电动机表现为单步运行。当励磁开始时,转子在电磁力的作用下加速转动。在到达平衡点时。电磁驱动转矩为零,但转子的转速最大.由于惯性,转子冲过平衡点。这时电磁力产生负转还,转子在负转矩的作用下,转速逐渐为零,并开始反向转动。当转子反转过平衡点后。电磁力又产生正转矩,迫使转子又正向转动。如此下去,形成转子围绕平衡点的振荡。由于有机械摩擦和电磁阻尼的作用,这个振荡表现为衰减振荡、最终稳定在平衡点。
低频共振:当步进电动机的脉冲频率接近步进电动机的固有振荡频率或振荡频率的分频或倍频时,会使振荡加剧,严重时造成失步。当步进电动机工作在高频区时,由于换相周期短,转子来不及反冲。同时。绕组中的电流尚未上升到稳定值,转子没有获得足够的能量,所以在这个上作区中不会产生振荡。
分类
从步进电机不同的物理机构来分类,可以分为三类
- 反应式步进电机
由被激磁的定子绕组产生反应力矩实现步进运行
- 永磁式步进电机
定、转子均有激磁绕组(或转子用永久磁钢),由电磁力矩实现步进运行
- 混合式步进电机
混合式的
控制原理
转子:电机旋转的那一部分
定子:外圈固定不动的部分
相数:定子上的一对电极叫一相
绕组:定子每一极上缠绕的线圈
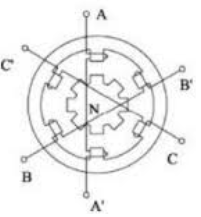
反应式步进电机通常转子是软磁材料做的,通过给每一相的绕组通电,产生磁场;磁通沿着最小磁阻闭合,在电磁力的作用下,使转子齿与定子那极轴线对齐;相当于变化的磁场,每改变一下磁场,定子走一步,这一步就叫步距角;
拍数:以三项来说有单三拍,双三拍,单双六拍,他们的控制通电的方法不同
单三排:A->B->C->A
双三拍:AB->BC->CA->AB
双六拍:A->AB->B->BC->C->CA->A
详细可参考一文读懂步进电机
、